The Making of Our Alien Earth: The Undersea Volcanoes of Santorini, Greece

The following expedition marks the third installment of NASA Astrobiology’s fieldwork series, the newly rebranded Our Alien Earth, streaming on NASA+ . Check out all three episodes following teams of astrobiologists from the lava fields of Holuhraun, Iceland, to the Isua Greenstone Belt of Greenland, and finally, the undersea volcanoes of Santorini, Greece. And stay tuned for the lava tubes of Mauna Loa, Hawaii in 2025.
THE VOYAGE BEGINS
My career at NASA has always felt like a mad scientist’s concoction of equal parts hard work, perseverance, absurd luck, and happenstance. It was due to this mad blend that I suddenly found myself on the deck of a massive tanker ship in the middle of the Mediterranean sea, watching a team of windburnt scientists, engineers, and sailors through my camera lens as they wrestled with a 5,000lb submersible hanging in the air.

“Let it out, Molly, slack off a little bit…” shouts deck boss Mario Fernandez, as he coordinates the dozen people maneuvering the vehicle. It’s a delicate dance as the hybrid remotely operated vehicle (ROV), Nereid Under Ice (NUI), is hoisted off the ship and deployed into the sea. “Tagline slips, line breaks… you’ve got a 5,000lb wrecking ball,” recounts Mario in an interview later that day.
How did I get here?
A few years ago I found myself roaming the poster halls of the Astrobiology Science Conference in Bellevue, Washington, struggling to decipher the jargon of a dozen disciplines doing their best to share their discoveries; phrases like lipid biomarkers, anaerobic biospheres, and macromolecular emergence floated past me as I walked. I felt like a Peanuts character listening to an adult speak.
Until I stumbled upon a poster by Dr. Richard Camilli entitled, Risk-Aware Adaptive Sampling for the Search for Life in Ocean Worlds. I was quickly enthralled in a whirlwind of icy moons, fleets of deep sea submersible vehicles, and life at sea.
“Are you free in November?”
“Absolutely,” I replied without checking a single calendar.
Five months and three flights later, I arrived at the port of Lavrio, Greece, as Dr. Camilli and his team were unloading their suite of vehicles from gigantic shipping crates onto the even more massive research vessel. I stocked up on motion sickness tablets, said a silent farewell to land, and boarded the ship destined for the undersea Kolumbo volcano.
Greece is a great place to study geology, because it’s a kind of supermarket of natural disasters.

Dr. Paraskevi NomikoU
University of Athens

LIFE AT SEA
Documenting astrobiology fieldwork has taken me to some pretty remote and rough places. Sleeping in wooden shacks in Iceland without running water and electricity, or bundled up in a zero-degree sleeping bag in a tent while being buffeted by gale force winds in the wilderness of Greenland. But life at sea? Life at sea is GOOD.




I was fortunate to have a personal cabin all to myself: a set of bunk beds, a small bathroom with a shower, and a small desk with plenty of outlets for charging my gear. I would also be remiss if I didn’t mention the mess hall. Aside from a freshly rotated menu of three hot meals a day, it was open 24/7 with a constant lineup of snacks to keep bellies full and morale high. This was luxury fieldwork. The ability to live, work, and socialize all in the same place would make this trip special in its own right, and allowed me to really get to know the team and capture every angle of this incredibly complex and multi-faceted expedition.
SEARCHING FOR LIFE ON OCEAN WORLDS
“The goal of this program is cooperative exploration with under-actuated vehicles in hazardous environments,” explains Dr. Camilli as we stand on the bow of the ship, the sun beginning to set in the distance. “These vehicles work cooperatively in order to explore areas that are potentially too dangerous or too far away for humans to go.”
This is the problem at hand with exploring icy ocean worlds like Jupiter’s moon, Europa. The tremendous distance between Earth and Europa means we will barely be able to communicate and control vehicles that we send to the surface, and will face even more difficulty once those vehicles dive below the ice. This makes Earth’s ocean a perfect testbed for developing autonomous, intelligent robotic explorers.
“I’ve always been struck at how parallel ocean exploration and space exploration is,” says Brian Williams, professor from the Computer Science and Artificial Intelligence Laboratory at MIT. “Once you go through the surface, you can’t communicate. So, somehow you have to embody the key insights of a scientist, to be able to look and see: is that evidence of life?”
MEET THE FLEET
Exploring anywhere in space begins with a few simple steps: first, you need to get a general map of the area, which is typically done by deploying orbiters around a celestial body. The next step is to get a closer look, by launching lander and rover missions to the surface. Finally, in order to understand the location best, you need to bring samples back to Earth to study in greater detail.
“So you can think of what we’re doing here as being very parallel, that the ship is like the orbiter and is giving us a broad view of the Kolumbo volcano, right? Once we do that map, then we need to be able to explore interesting places to collect samples. So, the gliders are navigating around places that look promising from what the ship told us. And then, it looks to identify places where we might want to send NUI. NUI is very capable in terms of doing the samples, but it can’t move around nearly as much. And so, we finally put NUI at the places where the gliders thought that they were interesting.”
THE SCIENTIST’S ROBOTIC APPRENTICE
As the espresso machine in the mess hall whirred away pouring out a much needed shot of caffeine, I sat with Eric Timmons, one of the expedition’s computer science engineers. Eric wears a few hats on the ship, but today we are discussing automated mission planning, the first step to true autonomy in robotic exploration.
“In any sort of scientific mission, you’re going to have a list of goals, each with their own set of steps, and a limited amount of time to achieve them. And so, Kirk works on automating that.” Kirk is the nickname of one of the many algorithms involved in the team’s automated mission planning. It’s joined by other algorithms, all named after Star Trek characters, collectively known as Enterprise, each responsible for different aspects of planning a mission and actively adapting to new mission parameters.
Dr. Richard Camilli explains further: “Basically, we have scientists onboard the ship that are feeding policies to these automated planners. [The planners] then take those policies plus historical information, the oceanographic context, and new information being transmitted by the vehicles here and now; they take all that information, and combine it to construct a mission that gets to the scientific deliverables, while also being safe.”
These are areas that humans aren’t designed to go to. I guess the best analogy would be like hang gliding in Midtown Manhattan at night.

Dr. richard camilli
Woods Hole Oceanographic Institution
OK, let’s recap the story so far: the ship’s sonar and other instruments create a general map of the Kolumbo volcano. That information, along with data from previous missions, is fed to Enterprise’s team of algorithms, which generates a mission for the gliders. The gliders are deployed, and using their sensors, provide higher-fidelity data about the area and transmit that knowledge back to the ship. The automated mission planners take in this new data, and revise their mission plan, ranking potential sites of scientific interest, which are then passed onto NUI, which will conduct its own mission to explore these sites, and potentially sample anything of interest.
DIVE, DIVE, DIVE
After a few days on the ship, the routine of donning my steel-toed boots and hard hat when walking around the deck has started to become second nature. My drone skills have greatly improved, as the magnetic field produced by the ship and its instruments forced me to take-off and land manually, carefully guiding the drone in and around the many hazards of the vessel. This morning, however, I’ve been invited to step off the ship for the first time to get a first-hand look at deploying the gliders. Angelos Mallios from the glider team leads me down into the bowels of the ship to the lower decks, as we arrive at a door that opens to the outside of the ship, waves lapping about six feet below. A zodiac pulls up to the door and we descend down a ladder into the small boat.
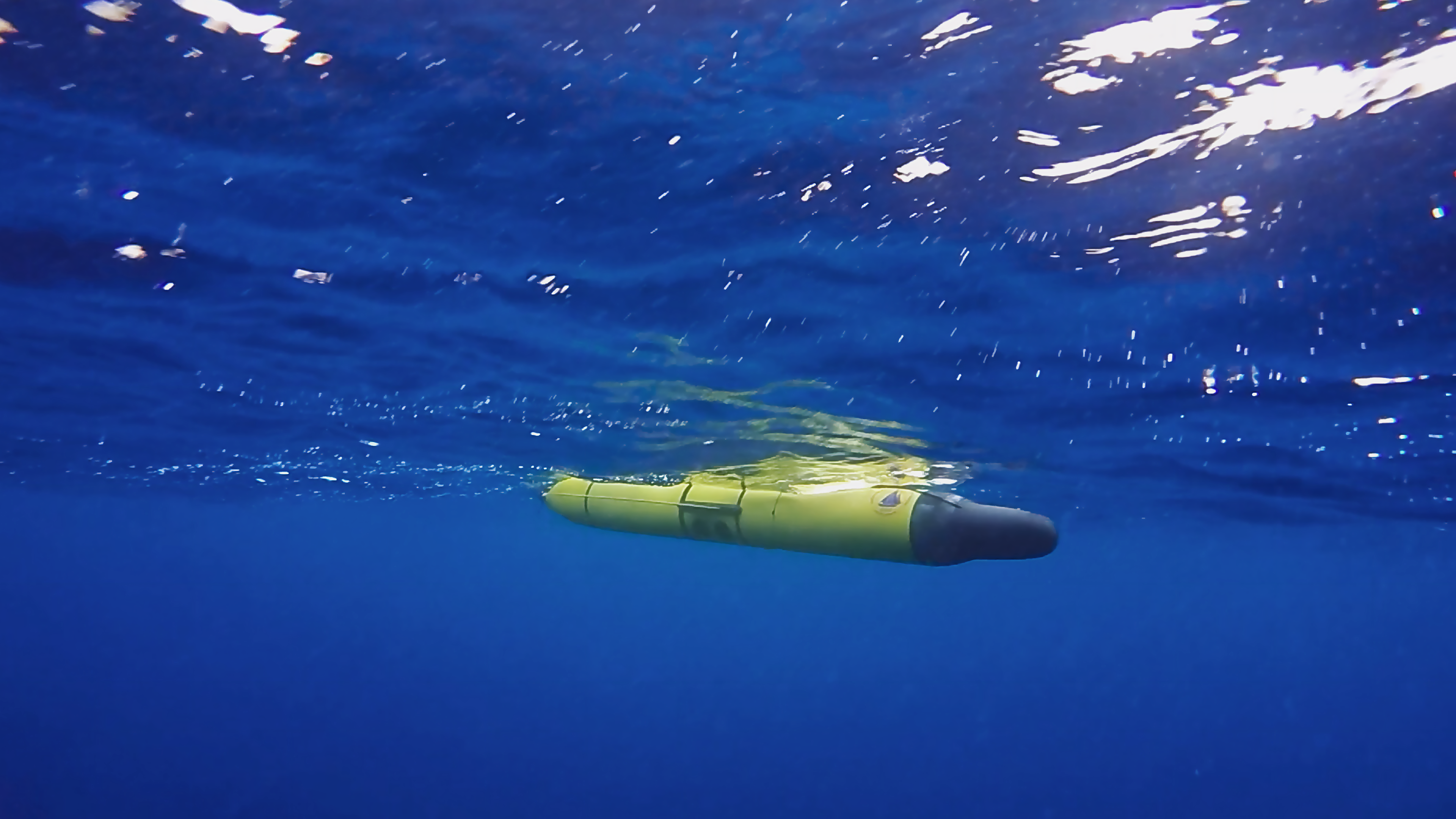
Meanwhile, the rest of the glider team is on the main deck of the ship, lifting the gliders with a large, motorized crane, and lowering them onto the surface of the water. The zodiac team approached to detach the glider and safely set it out into the sea, while I dipped a monopod-mounted action camera in and out of the water to capture the process. Unbeknownst to me at the time, this would become some of my favorite footage of the trip, sunlight dancing off the surface of the waves, while the gliders floated and dove beneath.
Angelos’ radio began to chatter. Eric Timmons was onboard the ship ready to command the gliders to begin their mission plan assigned by Enterprise. A moment passed and the yellow fin of the glider dipped below the water’s surface and disappeared.

NUI VERSUS THE VOLCANO
The following day, it was time to see the star of the show in action; the expedition team was ready to deploy the aforementioned 5,000lb wrecking ball, NUI. The gliders had been exploring the surrounding area day and night, using their suite of sensors to detect areas of scientific interest. Since this mission is about searching for life, the gliders know that warmer areas could indicate hydrothermal vent activity; a literal hotspot for life in the deep ocean. Kirk, along with the science planner algorithm, Spock, determined a list of possible candidates that fit that exact description.

“There’s always a bit of tension in the operations, where, do you go strike out in an area that is unstudied and potentially come back with nothing? Or do you go to a site that you know and try to understand it a little bit more, that kind of incremental advance?” Dr. Camilli pauses to take a quick swig of sparkling water after a long day of diving operations, as he recounts a moment in the control room earlier that day. All the scientists onboard this expedition are extremely skilled and knowledgable, and this mission is asking them to put aside their instincts, and follow the suggestions of computer algorithms; a hard pill to swallow for some.
“We stuck with the Spock program, and it paid great dividends. And all of the scientists were amazed at what they saw. The first site that we went to was spectacular. The second site we went to was spectacular. Each of the five sites that it identified as interesting were interesting, and they were each interesting in a different way; totally different environments.”
Interesting, in this case, was quite the understatement. As the expedition team and I crowded into the ship’s control room to look at the camera feeds transmitted by NUI, now fully deployed to the seafloor, audible gasps erupted from multiple people. Bubbles filled the monitor as live fumaroles, active vents from the volcano, were pouring out heat and chemical-rich fluid into the water. Thick, microbial mats covered the surrounding rock, and multicellular lifeforms dotted the landscape. The expedition team had found a live hydrothermal vent, and life thriving around it.
SOUVENIRS FROM THE OCEAN FLOOR
“I’ve never seen anything like that before,” recalls Casey Machado, expedition lead and the main pilot for Nereid Under Ice (NUI). Casey is sitting in an office chair surrounded by glowing monitors, a joystick in their left hand, and a gaming controller in their right. Since NUI is a hybrid ROV, it can be controlled manually from the ship by remote, or receive autonomous instructions from the Enterprise mission planners. Today, the team plans on manually controlling NUI to retrieve samples from the first site of interest.
NUI is a strange looking vehicle. Only a small section of its body is watertight, where many of its critical components are housed. The remainder is fairly open, and upon arriving at the first site recommended by Spock, the front of the ROV opens up its front double doors to reveal a multi-jointed manipulator arm, stereo camera set, and other instruments. I’m instantly reminded of the space shuttle mission to repair the Hubble Space Telescope, which had a similar mechanism.
Casey deftly maneuvers each joint of the arm to approach a rock covered in microbial mats. The end of NUI’s arm is equipped with two sampling instruments: a claw-like grabbing mechanism and a vacuum-like hose called the “slurp gun”. The end of the arm twists and turns as Machado aligns it with the rock, eventually opening and closing it around the target. With a gentle pull, the rock comes loose, and with a few more careful manipulations places it delicately into NUI’s sample cache. I offer a high-five, which Casey nonchalantly returns like the whole task was nothing.
TEACHING A ROBOT TO FISH
At this point, the expedition team has collected dozens of samples and achieved multiple engineering milestones, enough to fill years’ worth of scientific papers, but they are far from finished. A true mission to an ocean world will have to be pilotless, as Dr. Gideon Billings from MIT explains: “They need to operate without any human intervention. They need to be able to understand the scene through perception and then make a decision about how they want to manipulate to take a sample or achieve a task.”
Gideon sits in the control room to the left of the piloting station, working alongside Casey as they prepare to demonstrate NUI’s automated sampling capabilities. His laptop screen shows a live 3D-model of the craft, its doors open, arm extended. Projected around the craft is a 3D reconstruction, or point cloud, of the seafloor created from the stereo camera pair mounted inside the vehicle. Similarly to how our brains take the two visual feeds from both of our eyes to see three-dimensionally, a stereo camera pair uses two cameras to achieve the same effect. By clicking on the model and moving its position in the software, NUI performs the same action thousands of meters under the ocean.

“That is shared autonomy, where you could imagine a pilot indicating a desired pose
for the arm to move to, but then a planner taking over and coming up with the path that the arm should move to reach that goal. And then, the pilot just essentially hitting a button and the arm following that path.”
Over the course of multiple dives, Gideon tested various sampling techniques, directing the manipulator arm to use its claw-like device to grab different tools and perform a variety of tasks. “We were able to project the point cloud into that scene, and then command the arm to grab a push core and move it into a location within that 3D reconstruction. We verified that that location matched up. That showed the viability of an autonomous system.” This seemingly small victory is a huge step towards exploring planets beyond Earth. Since this expedition, the engineering team has not only improved this shared autonomy system, but has also implemented a natural language interface, allowing a user to use their normal speaking voice to give commands to the ROV, further blurring the lines between reality and science fiction.
SOMEWHERE BEYOND THE SEA
I cannot help but envy the life of those who chose to make the ocean their place of work. The time I’ve spent with oceanographers has me questioning all my life choices; clearly they knew something I didn’t.
Watching the sunrise every morning, peering through the murky depths of the deep sea, unlocking the secrets of Earth’s final frontier. All in a day’s work for Dr. Richard Camilli and his team of intrepid explorers.
Watch Our Alien Earth and The Undersea Volcanoes of Santorini, Greece on NASA+ and follow the full story of this incredible expedition.

Comments are closed.